
Dernier ajout en date: le retour audio faible latence!
Vous pouvez désormais écouter ce qui se passe autour des robots, le tout avec une latence de maximum 0.5 secondes!
Le flux audio, s’ajoute au flux vidéo, et au flux bidirectionnel de contrôle et de télémétrie du robot.
Des flux de donnés séparés et un design bien pensé
Le flux de données audio et vidéo étant séparé du flux de contrôle du robot, il est possible de se connecter au flux audio/vidéo d’un robot, pendant qu’on contrôle un autre robot.
A cet effet, le design du serveur a un peu changé, désormais les logos du robot et des caméras changent pour indiquer leur état : En veille, actif ou déconnecté.
De plus la couleur verte du logo indique sur quel flux audio/vidéo vous êtes connecté et quel robot vous êtes en train de contrôler. 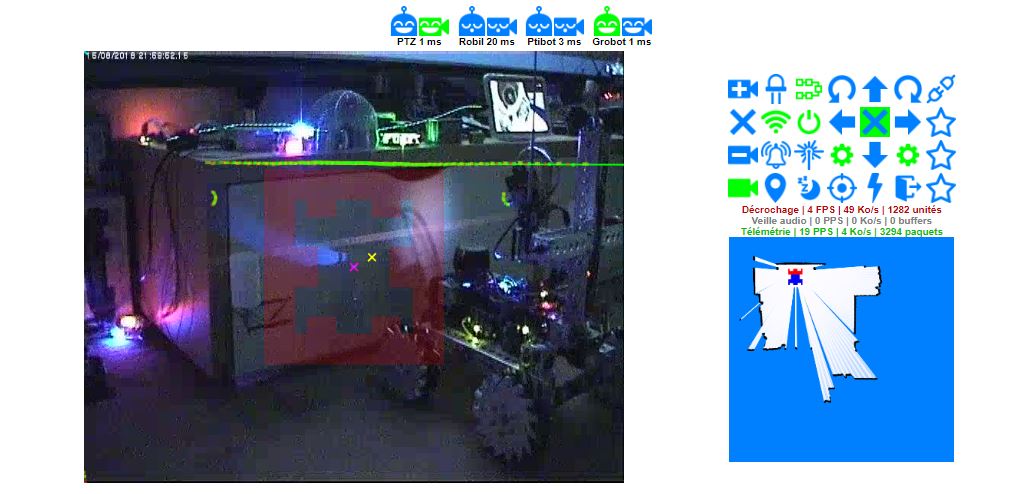
Ci-dessus, on est connecté au flux audio/vidéo de « PTZ », pendant qu’on pilote le robot « Grobot » et les robots « Robil » et « Ptibot » eux sont en veille.
On notera que la qualité des trois flux, audio, vidéo et contrôle, est surveillée avec des informations qui sont données sur la droite entre les boutons et la carte. Le vert indiquant que tout est parfait et le rouge indiquant un problème, le gris indiquant une absence de connexion. (Car il n’y a pas de micro sur le robot « PTZ »)
N’hésitez pas à tester par vous-même dès maintenant sur le site de test.
Il vous faudra demander l’autorisation dans le chat présent sur le site.