
Qui sommes-nous ?
Nous sommes deux développeurs, entrepreneurs, et passionnés de robotique, travaillant pour le moment essentiellement sur les fonctionnalités logicielles du système. Pour en savoir plus sur nous vous pouvez nous retrouver sur le web sous les pseudo Mike118 et Serveurperso.
Qu’est-ce que VIGIROBOTICS ?
VIGIROBOTICS, est un projet de startup en cours de développement. L’objectif est de proposer des solutions logicielles pour le contrôle à distance de robots ou de machines. Au-delà de la simple expérience de la télé-présence que nous pouvons fournir l’objectif de nos solutions est le contrôle avancé de la machine, afin de pouvoir réellement parler d’interventions à distance. L’entreprise n’est pas encore officiellement créée, mais cela ne nous empêche pas de commencer à communiquer sur le thème et de travailler sur le développement des solutions logicielles.
Quelles sont les fonctionnalités logicielles déjà en place ?
- Contrôle à distance d’un robot depuis un simple navigateur web avec feedback vidéo en faible latence.
- Localisation automatique du robot dans un environnement connu une fois la position de départ connue.
- Planification de trajectoire et déplacement autonome vers un point donné.
- Evitement d’obstacles automatique et modification des trajectoires planifiée en cours de déplacement.
- Retour automatique à la base de recharge et rechargement du robot.
- Contrôle d’actionneurs de type pince, tourelle de caméra, traceur laser expérimental.
- Planificateur de missions complexes gérant déplacement du robot dans la carte, gestion des actionneurs. Exemple concret de mission : « Explore chacune des pièces du bâtiment, puis va attraper un objet qui se trouve à tel endroit, et dépose l’objet à tel autre endroit, puis retourne à ta base de recharge. »
- Gestion de la criticité des actions dans une mission. Exemple : « Si une pièce du bâtiment n’est pas accessible, explore le reste des pièces », « Si tu n’as pas réussi à attraper un objet, ne cherche pas à le déposer … et passe à la suite des tâches où le ramassage de l’objet n’était pas nécessaire ».
- Gestions de mouvements composés du type « viser la cordonnée indiquée avec la caméra, indépendamment de la position du robot » dont la précision est démontrée notamment avec le tracé d’un dessin vectoriel sur un tableau avec un laser, pendant que le robot se déplace.
- Gestion de plusieurs caméra, sélectionnable une par une.
- Contrôle du robot par plusieurs utilisateurs simultanément avec comme seule limite la bande passante du serveur.
- Expression vocale du robot : Le robot parle pour vous transmettre des informations. La personne contrôlant le robot à distance peut aussi taper un texte qui sera répété par le robot pour communiquer.
- Mise en veille lorsque personne n’utilise le robot.
Pouvez vous expliquer un peu plus en détail l’interface utilisateur ?
L’interface utilisateur se résume en une simple page web que l’on peut ouvrir depuis n’importe quel navigateur sur n’importe quel type de plateforme desktop pc, smartphone, tablette numérique … 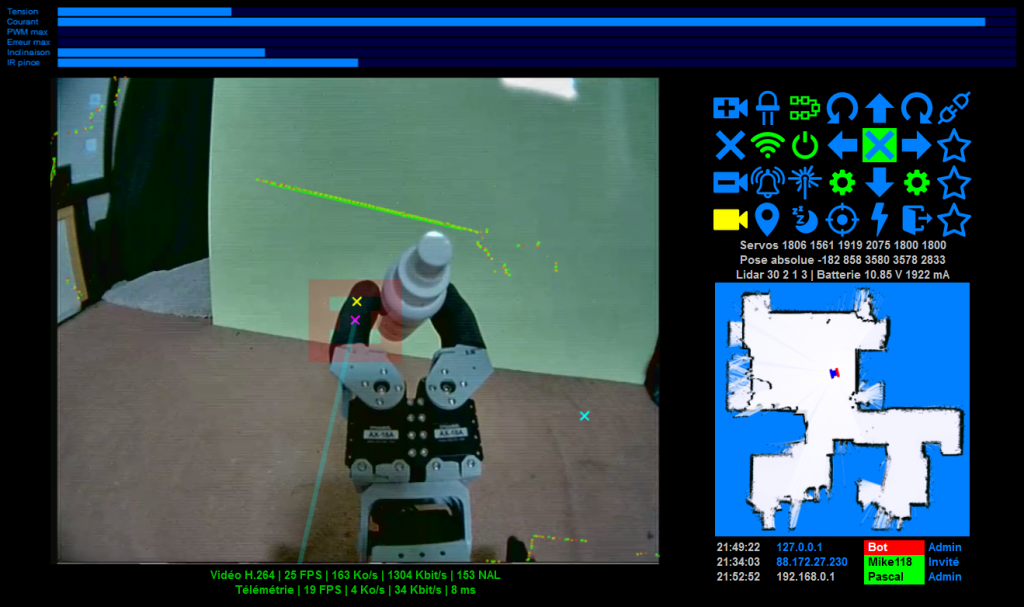
On notera plus particulièrement :
- Les informations systèmes critique, tout en haut sous forme de barre graphe, dont font partie le niveau de batterie, et la consommation du robot.
- La partie retour vidéo, sur la gauche, qui affiche le retour vidéo de la caméra sélectionnée ainsi que diverses informations comme la direction vers laquelle on demande au robot d’aller (trait bleu), les obstacles proches du robot (points vert), la zone de sécurité du robot (carré rouge), les curseurs de contrôle (croix). Ces notifications peuvent être désactivée si elles gênent l’utilisateur, et on peut aussi garder uniquement ces notifications et supprimer le retour vidéo s’il n’est pas requis pour économiser les données envoyées.
L’interface vidéo est aussi un panel d’entrée. En cliquant et bougeant sur cette zone vous pouvez contrôler le déplacement de la caméra ou des actionneurs en fonctions de l’outil sélectionné, cette zone sert aussi à réveiller le robot. Des informations supplémentaires sont indiquées sous le flux vidéo indiquant entre autres, le nombre d’images par secondes et la quantité de données envoyées. - Le panel de boutons de contrôle, en haut à droite. Les boutons servent à lancer des missions, modifier les paramètres d’affichages, sélectionner l’outil contrôlé et la caméra, contrôler manuellement le robot et plus encore… Ces boutons sont aussi accessibles par des raccourcis clavier. Les couleurs des boutons changent en fonction de l’activité du robot et permettent ainsi sa supervision en direct.
Des informations supplémentaire sont disponible sous les boutons. - La carte, en bas à droite, qui affiche où se trouve précisément le robot dans son environnement, où sont les obstacles, quelles sont les zones non explorées par le robot… En un simple clic sur cette carte vous ordonnez ou robot d’aller à la coordonnée ciblée. Il est possible de combiner un clic sur un point de la carte avec une mission pour faire des missions de type » dépose un objet à tel endroit » …
- Sous la carte, on peut voir des informations sur les personnes connectées sur le robot.Le plus simple est de voir par vous-même l’interface et de l’utiliser. Pour le moment deux machines sont déployées :
Interface du robot 1.
Interface du robot 2.
Quelle est la plateforme robotique utilisée aujourd’hui pour les tests ?
Pour le moment, l’ensemble du développement logiciel est réalisé sur une simple plateforme robotique fait maison, modulaire, simple et efficace, réalisée à partir d’un kit robot ROBIL 4WD Robot Maker. L’ensemble de l’électronique et du logiciel est conçu de manière modulaire afin de pouvoir facilement être porté sur un autre robot, qu’il soit fait maison, ou qu’il s’agisse d’une plateforme robotique standard disponible dans le commerce.

Est-ce que le projet est Open Source ?
Pour le moment, le projet n’est pas Open Source, mais nous sommes ouverts à un éventuel partage sous licences Open Source plus tard … Pour cela il nous faudra entre autre étudier les différentes licences existantes …
Nous partageons néanmoins quelques informations techniques au fur et à mesure sur la communauté de robotique francophone www.robot-maker.com avec qui nous avons un partenariat.
Quels sont les domaines d’applications de vos solutions ?
Les domaines d’applications sont innombrables, autant qu’on peut en imaginer je suppose … Que cela soit pour de la surveillance simple, pour les bâtiments en constructions par exemple où les vols sont nombreux, pour surveiller des serveurs informatique, avec la possibilité d’intervenir avec le robot pour appuyer sur des boutons ou relancer des systèmes …
On peut aussi très bien imaginer de la surveillance un peu plus complexe en zone industrielle, comme les bâtiments d’élevage, ou des usines de fabrications par exemple …
On pourrait très bien imaginer installer le robots dans un appartement qui serait à vendre ou à louer pour que les potentiels intéressés par le bien soient en mesure de visiter réellement l’appartement en toute liberté à distance …
Exemple de service déjà en place proposés par d’autres entreprises:
Et cela pourra sans doute s’appliquer à d’autre domaines d’applications qui n’existent pas encore!
Quelles sont les prochaines phases de développement ?
- Développement d’un outil permettant de facilement paramétrer de nouvelles cartes au robot. Le choix de paramétrer l’environnement facilement dans le robot permet une très grande robustesse et répétabilité.
- Développement d’un outil permettant de facilement paramétrer de nouvelles actions ou missions, qui se déclenchent grâce au panel de bouton de commande.
- Réduction de la latence du retour audio.
- Amélioration de la modularité de l’ensemble. Développement de cartes électroniques.
- Développement d’un cloud pour le contrôle des robots en multi-utilisateurs même si le site surveillé ne dispose que d’une connexion ADSL, permettant ainsi de contourner le problème de limitation de bande passante du serveur.
- Connectivité GSM, 3G, 4G, et GPS pour les activités en extérieur.
- Système d’apprentissage fondé sur comment l’utilisateur contrôle le robot.
- Amélioration continue des briques logiciels : Suivi de personne ou d’objets, traitement et analyse d’images, imagerie thermique …
- Applications de la technologie aux drones volant.
Quelle est votre vision de la robotique ?
Nous avons une vision pragmatique de la robotique. La robotique s’installe progressivement dans les foyers, robots aspirateurs, robots tondeurs, robot laveurs de carreaux, et robots nettoyeurs de piscines… Les objets connectés s’intègrent de plus en plus dans notre quotidien et tout cela est permis parce que les solutions proposées deviennent abordables au grand publique …
Pas besoin de chercher à avoir le système le plus intelligent ou le plus high tech, il faut proposer le produit minimaliste le plus efficace au juste prix. Définissez votre besoin et nous pourrons vous fournir une solution adaptée. Même si pour le moment nous pensons que les plus intéressés par nos solutions seront des industriels, sur le principe, nous souhaitons être abordable au grand publique.
Pas besoin d’un haut niveau de qualification pour utiliser notre système, c’est littéralement un jeu d’enfant ! Et quant au prix, tout dépend des modules optionnels demandés. C’est là qu’on retrouve la puissance de la conception modulaire.
Comment La robotique doit-elle s’insérer avec les travailleurs ?
Souvent les gens disent : » mais vous n’avez pas honte ? Vous allez supprimer des emplois ! « , personnellement nous voyons les choses différemment pour deux raisons.
Premièrement, de la même façon qu’avec l’apparition des ordinateurs et de l’informatique tout le monde pensait que cela allait anéantir des milliers d’emplois, il est clair qu’aujourd’hui l’avènement de l’informatique et des ordinateurs a au contraire permis de créer des emplois ! Fabricants d’ordinateurs, informaticiens, programmeurs, développeurs, sans compter tous les métiers qui n’existeraient tout simplement pas sans ordinateurs … De plus, les ordinateurs, l’informatique et l’informatisation a permis à de nombreuses entreprises de se fiabiliser et d’augmenter leur productivité. Des améliorations sans lesquelles certaines entreprises n’auraient pas pu maintenir leur activité et fermer et par la même occasion supprimer les emplois qui dépendaient…
Deuxièmement, les robots doivent travailler de concert avec les humains, de la même façon que les usines ne peuvent être 100% automatisées … Ils sont là pour supprimer les tâches pénibles et répétitives, laissant ainsi à l’humain les tâches plus complexes de réflexion et d’analyse, du choix d’actions. Le but n’est pas de remplacer complètement l’humain qui reste derrière les commandes, mais qui en revanche a besoin de très peu d’attention pour gérer le système. Un humain peut ainsi facilement piloter plusieurs robots simultanément et exercer un simple contrôle de supervision voir reprendre le contrôle manuellement si nécessaire. Imaginez un ouvrier qui est d’astreinte le week end et doit surveiller en continue le bon fonctionnement d’un parc de machine… Plutôt que de devoir rester sur site, il peut toujours être d’astreinte mais auprès de sa famille, et contrôler à distance un robot pour faire des inspections, voir même des interventions …
Cherchez-vous des partenaires ? Des clients ?
Mis à part notre partenariat avec www.robot-maker.com nous n’avons pas encore d’autre partenariat officiel mais nous en cherchons activement. Donc si vous êtes fabriquant de robots mobiles ou de machines fixes et que vous souhaitez voir nos solutions logicielles de contrôle et de supervision portées sur vos systèmes, n’hésitez pas à nous contacter pour que nous puissions étudier votre dossier et vous faire des propositions!
Vous avez des questions? N’hésitez pas à les poser en commentaire !